
Tomas Hodan
Research Scientist at Meta
About me
I am a Staff Research Scientist at Meta (2020–2023 in Seattle, from 2023 in Zurich), working on spatial AI for AR/VR and robotics. My current research focuses on foundation models for 3D vision, particularly zero-shot object detection and pose estimation, as well as language-grounded spatial understanding. I created the BOP benchmark, which became the standard for evaluating object pose estimation, organize R6D workshops, and serve as an Area Chair at major vision conferences. Prior to joining Meta in 2020, I received my PhD in computer vision under the supervision of Prof. Jiri Matas at the Czech Technical University in Prague, during which I interned at Microsoft Research and Google.
Updates
Publications
See my Google Scholar profile for a full list.
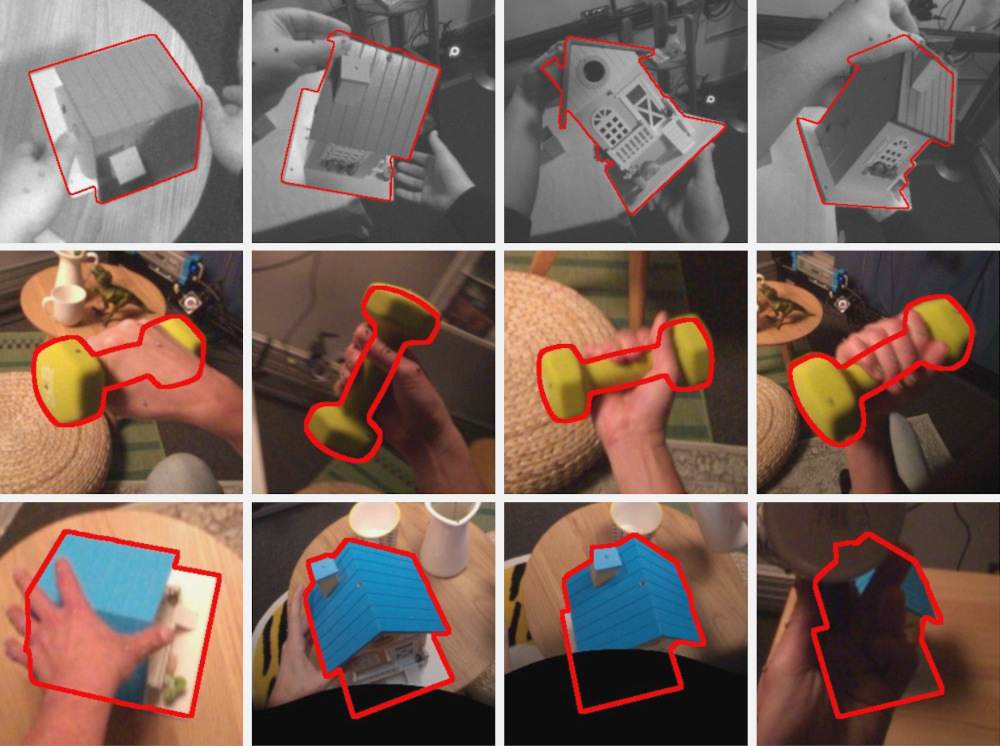
Prithviraj Banerjee, Sindi Shkodrani, Pierre Moulon, Shreyas Hampali, Shangchen Han, Fan Zhang, Linguang Zhang, Jade Fountain, Edward Miller, Selen Basol, Richard Newcombe, Robert Wang, Jakob Julian Engel, Tomas Hodan
Accepted as highlight
CVPR 2025, Nashville
Paper Web Poster
Van Nguyen Nguyen, Christian Forster, Sindi Shkodrani, Vincent Lepetit, Bugra Tekin, Cem Keskin, Tomas Hodan
CVPR Workshops (CV4MR) 2025, Nashville
Paper Code
Van Nguyen Nguyen, Stephen Tyree, Andrew Guo, Médéric Fourmy, Anas Gouda, Taeyeop Lee, Sungphill Moon, Hyeontae Son, Lukas Ranftl, Jonathan Tremblay, Eric Brachmann, Bertram Drost, Vincent Lepetit, Carsten Rother, Stan Birchfield, Jiri Matas, Yann Labbé, Martin Sundermeyer, Tomas Hodan
CV4MR Best Paper Award
CVPR Workshops (CV4MR) 2025, Nashville
Paper Web Poster
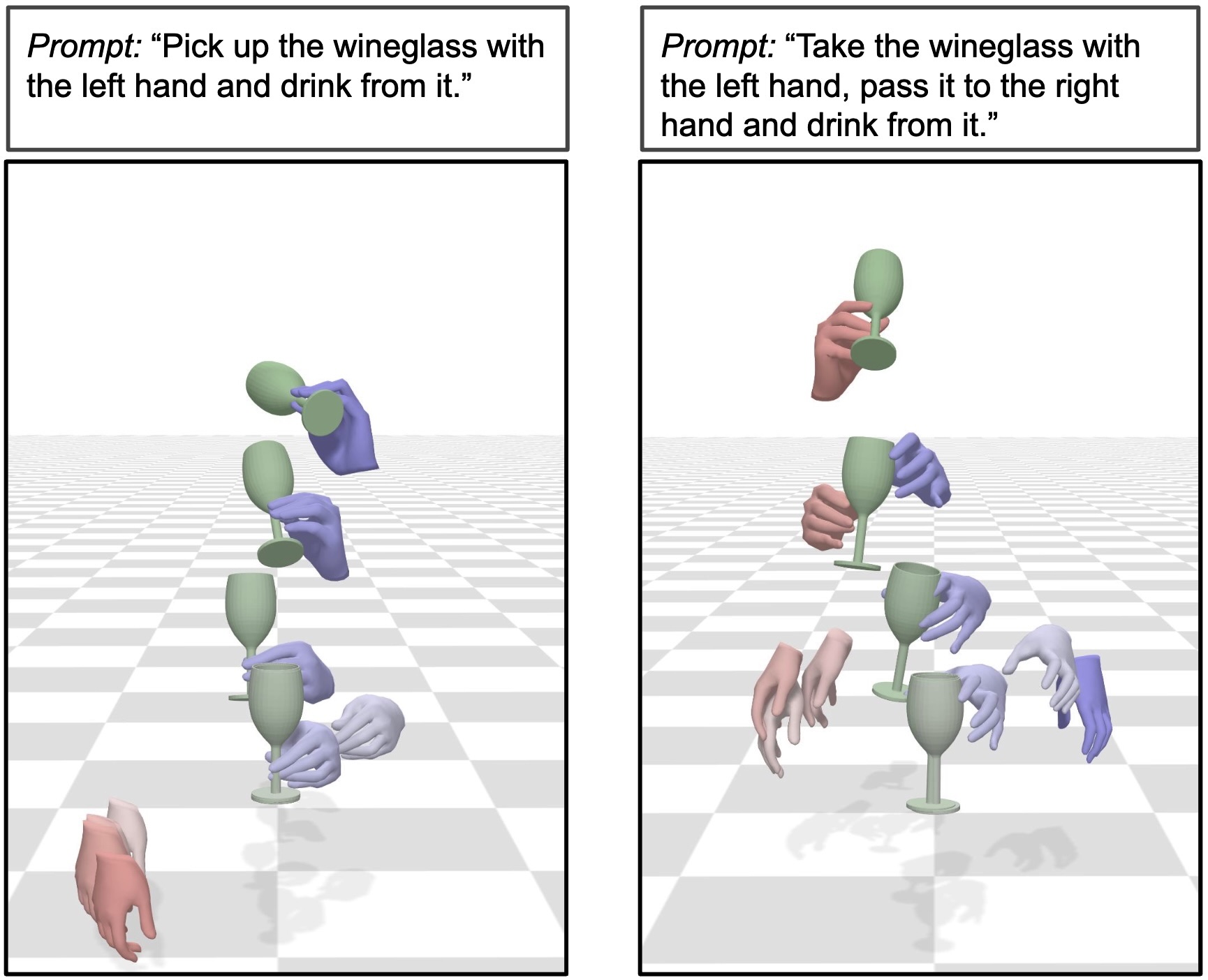
Sammy Christen, Shreyas Hampali, Fadime Sener, Edoardo Remelli, Tomas Hodan, Eric Sauser, Shugao Ma, Bugra Tekin
SIGGRAPH Asia 2024, Tokyo
Paper Web

Evin Pınar Örnek, Yann Labbé, Bugra Tekin, Lingni Ma, Cem Keskin, Christian Forster, Tomas Hodan
ECCV 2024, Milan
Paper Web Code Poster
Tomas Hodan, Martin Sundermeyer, Yann Labbé, Van Nguyen Nguyen, Gu Wang, Eric Brachmann, Bertram Drost, Vincent Lepetit, Carsten Rother, Jiri Matas
CVPR Workshops (CV4MR) 2024, Seattle
Paper Web

Van Nguyen Nguyen, Thibault Groueix, Georgy Ponimatkin, Vincent Lepetit, Tomas Hodan
ICCV Workshops (R6D) 2023, Paris
Paper Code

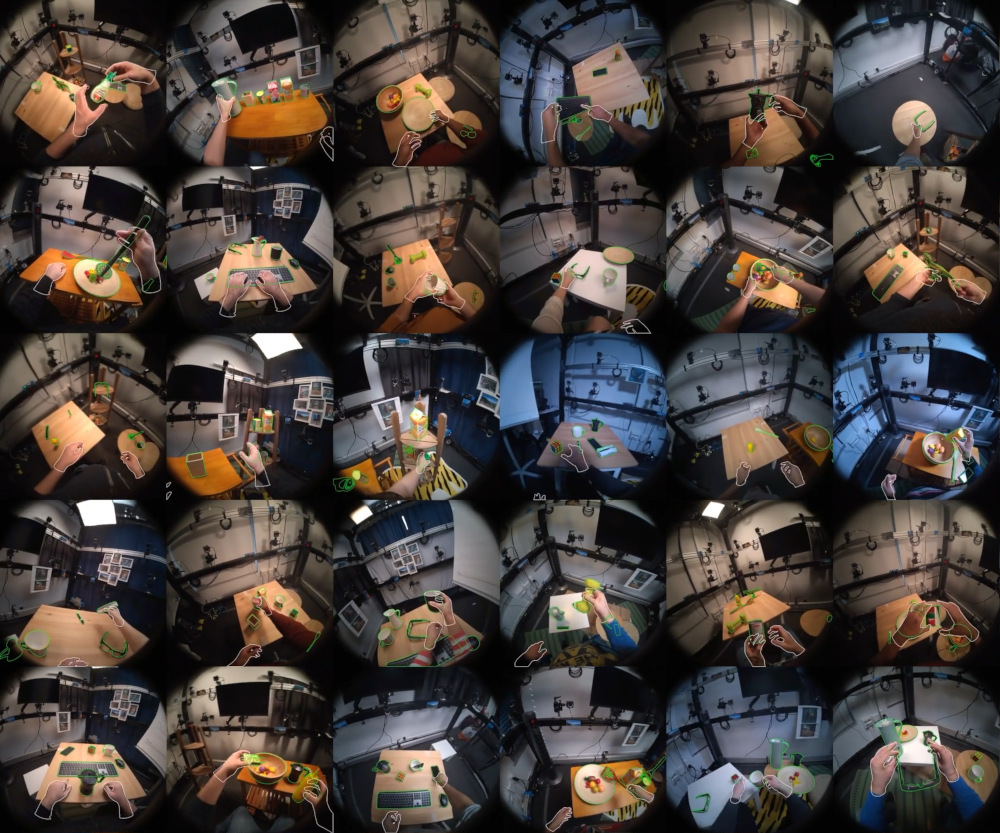
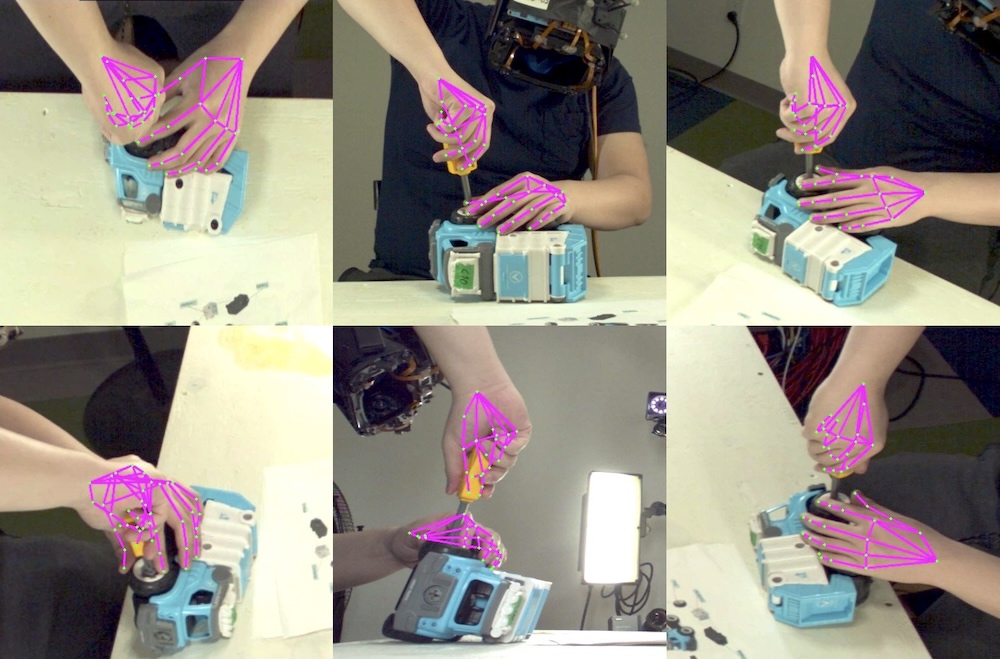
Shreyas Hampali, Tomas Hodan, Luan Tran, Lingni Ma, Cem Keskin, Vincent Lepetit
CVPR 2023, Vancouver
Paper Web Video BibTeX
Takehiko Ohkawa, Kun He, Fadime Sener, Tomas Hodan, Luan Tran, Cem Keskin
EgoVis 2023/2024 Distinguished Paper Award
CVPR 2023, Vancouver
Paper Web
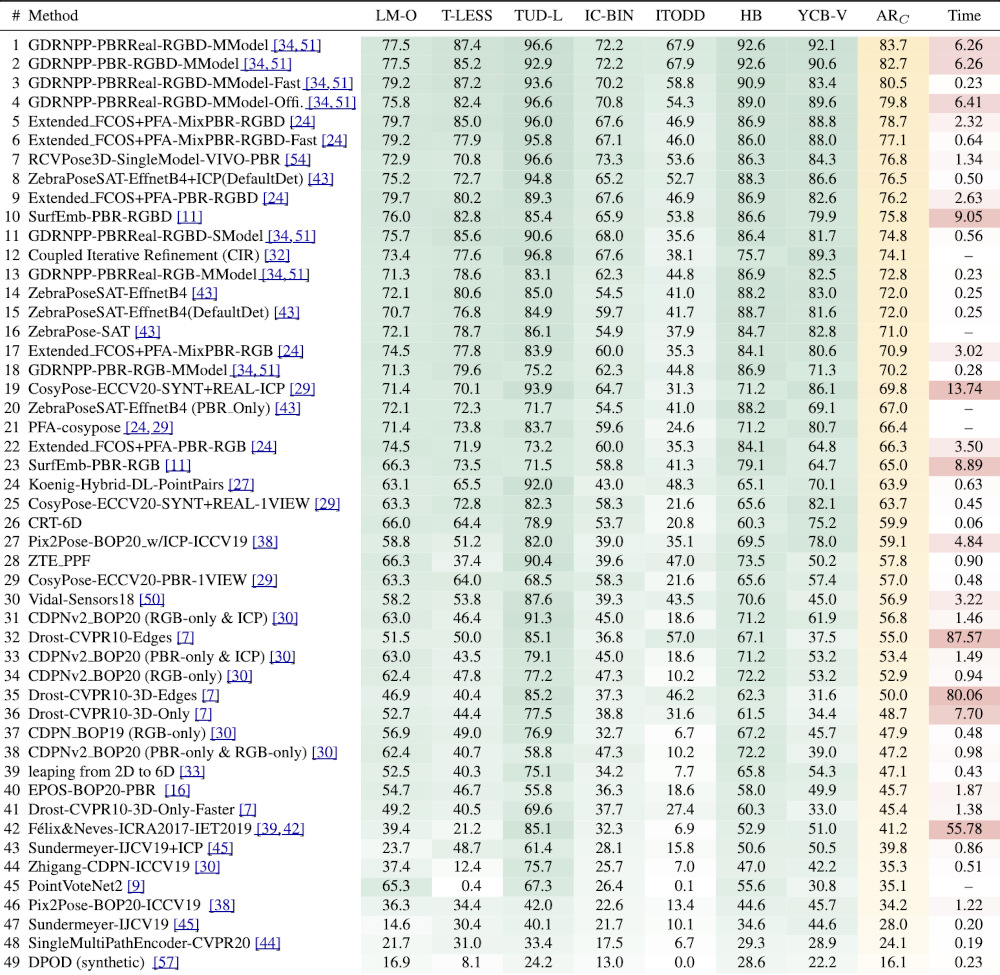
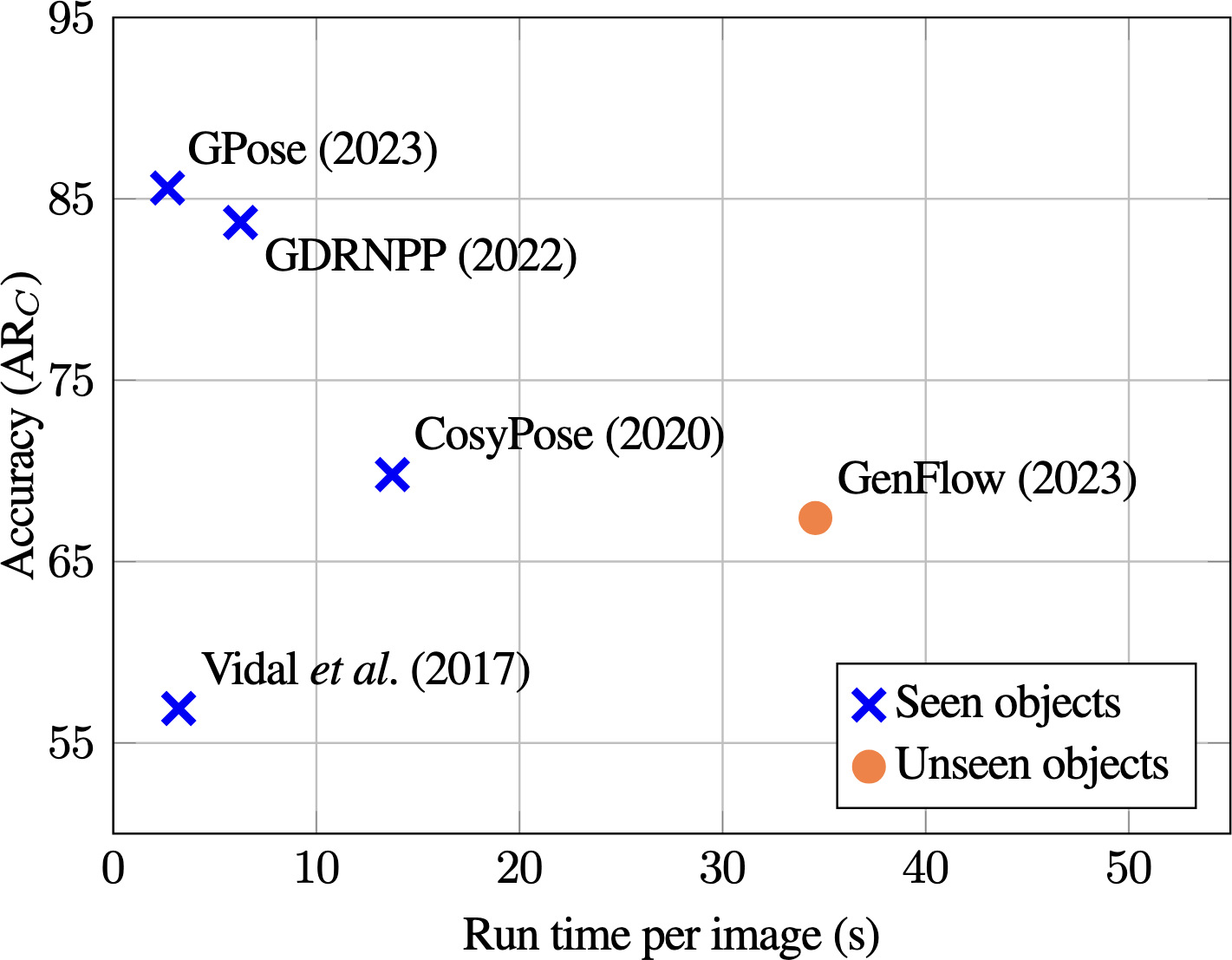
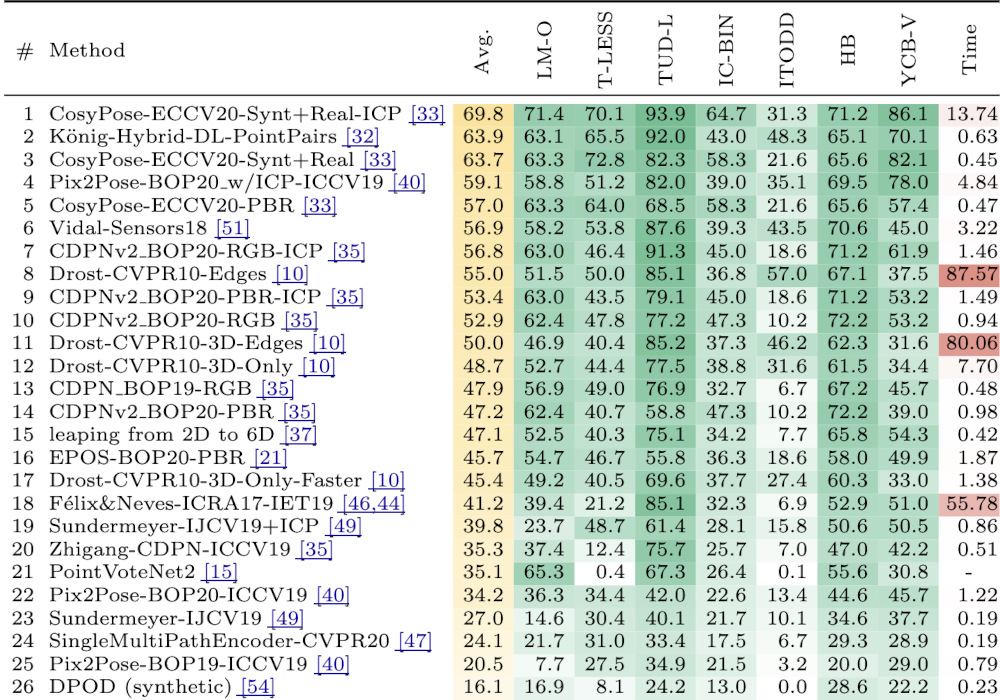
Martin Sundermeyer, Tomas Hodan, Yann Labbé, Gu Wang, Eric Brachmann, Bertram Drost, Carsten Rother, Jiri Matas
CVPR Workshops (CV4MR) 2023, Vancouver
Paper Web BibTeX

Shangchen Han, Po-chen Wu, Yubo Zhang, Beibei Liu, Linguang Zhang, Zheng Wang, Weiguang Si, Peizhao Zhang, Yujun Cai, Tomas Hodan, Randi Cabezas, Luan Tran, Muzaffer Akbay, Tsz-Ho Yu, Cem Keskin, Robert Wang
SIGGRAPH Asia 2022, Daegu
Paper Code

Lin Huang, Tomas Hodan, Lingni Ma, Linguang Zhang, Luan Tran, Christopher Twigg, Po-Chen Wu, Junsong Yuan, Cem Keskin, Robert Wang
ECCV 2022, Tel-Aviv
Paper Code Web

Enric Corona, Tomas Hodan, Minh Vo, Francesc Moreno-Noguer, Chris Sweeney, Richard Newcombe, Lingni Ma
CVPR 2022, New Orleans
Paper Web
Tomas Hodan, Martin Sundermeyer, Bertram Drost, Yann Labbé, Eric Brachmann, Frank Michel, Carsten Rother, Jiri Matas
ECCV Workshops (R6D) 2020, Glasgow
Paper Web Workshop BibTeX

Yash Patel, Tomas Hodan, Jiri Matas
ECCV 2020, Glasgow
Paper Video BibTeX
Maximilian Denninger, Martin Sundermeyer, Dominik Winkelbauer, Dmitry Olefir, Tomas Hodan, Youssef Zidan, Mohamad Elbadrawy, Markus Knauer, Harinandan Katam, Ahsan Lodhi
RSS Workshops 2020, Corvallis
Paper Code Video BibTeX

Tomas Hodan, Vibhav Vineet, Ran Gal, Emanuel Shalev, Jon Hanzelka, Treb Connell, Pedro Urbina, Sudipta N. Sinha, Brian Guenter
ICIP 2019, Taipei
Paper Dataset Slides BibTeX

Tomas Hodan, Frank Michel, Eric Brachmann, Wadim Kehl, Anders Glent Buch, Dirk Kraft, Bertram Drost, Joel Vidal, Stephan Ihrke, Xenophon Zabulis, Caner Sahin, Fabian Manhardt, Federico Tombari, Tae-Kyun Kim, Jiri Matas, Carsten Rother
ECCV 2018, Munich
Paper Web Slides Poster BibTeX

Tomas Hodan, Jiri Matas, Stepan Obdrzalek
ECCV Workshops 2016, Amsterdam
Paper Slides Code BibTeX
Tomas Hodan, Xenophon Zabulis, Manolis Lourakis, Stepan Obdrzalek, Jiri Matas
IROS 2015, Hamburg
Paper Slides Video BibTeX

Tomas Hodan, Dima Damen, Walterio Mayol-Cuevas, Jiri Matas
ISMAR Workshops 2015, Fukuoka
Paper BibTeX
PhD thesis

Supervisor: Prof. Jiri Matas
Reviewers: Prof. Vincent Lepetit, Prof. Markus Vincze, Dr. Slobodan Ilic
Czech Technical University in Prague, 2021
Received the Rector's Prize for an outstanding PhD thesis
Thesis Defense Slides BibTeX
Activities
Organized BOP challenges on object pose estimation:
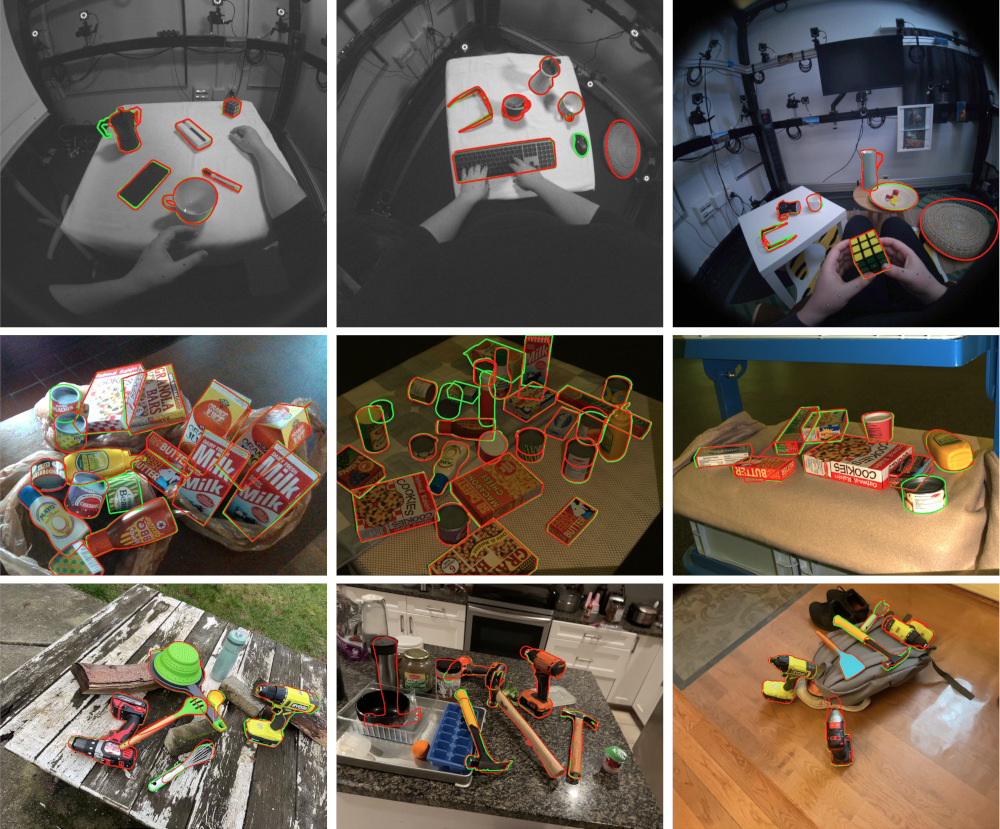
- BOP 2025 – Focus on industrial robotics and new BOP-Industrial datasets (IPD, XYZ-IBD, ITODD-MV).
- BOP 2024 – New CAD-free tasks and BOP-H3 datasets (HOT3D, HOPEv2, HANDAL).
- BOP 2023 – New tasks on objects unseen during training.
- BOP 2022 – New 2D detection and segmentation tasks.
- BOP 2020 – Focus on synthesis of effective training data by developing BlenderProc4BOP.
- BOP 2019 – New 6D object localization task and evaluation methodology.
- SIXD 2017 – The first challenge on 6D object pose estimation.
Organized R6D workshops on object pose estimation:
- 10th R6D workshop (ICCV 2025, Honolulu)
- 9th R6D workshop (ECCV 2024, Milan)
- 8th R6D workshop (ICCV 2023, Paris)
- 7th R6D workshop (ECCV 2022, Tel-Aviv)
- 6th R6D workshop (ECCV 2020, Glasgow)
- 5th R6D workshop (ICCV 2019, Seoul)
- 4th R6D workshop (ECCV 2018, Munich) – summary
- 3rd R6D workshop (ICCV 2017, Venice)
- 2nd R6D workshop (ECCV 2016, Amsterdam)
- 1st R6D workshop (ICCV 2015, Santiago)
Other co-organized events:
- Sense of Space Workshop (CVPR 2026, Denver)
- OpenCV Perception Challenge for Bin-Picking (CVPR 2025, Nashville)
- Workshop on Perception for Industrial Robotics Automation – PIRA (CVPR 2025, Nashville)